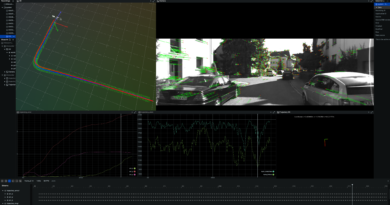
Realtime Edge Based Visual Odometry for a Monocular Camera
An interesting work on edge-based visual odometry: the REBVO method was presented at ICCV’15
Tarrio, J. J., & Pedre, S. (2015). Realtime Edge-Based Visual Odometry for a Monocular Camera. In Proceedings of the IEEE International Conference on Computer Vision (pp. 702-710).
Code is OpenSource at GitHub! https://github.com/JuanTarrio/rebvo