3DMR – 3D Multi-Robot Exploration with a Two-Level Coordination Strategy and Prioritization
Check out the new 3DMR project on 3D multi-robot exploration in collaboration with Prof. Rui Rocha, David Portugal, and Tiago
Read moreRobotics & Computer Vision Engineer, PhD
Check out the new 3DMR project on 3D multi-robot exploration in collaboration with Prof. Rui Rocha, David Portugal, and Tiago
Read more
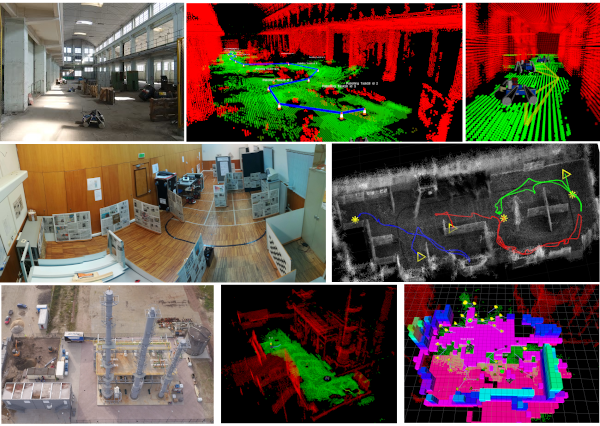
I am very excited to release the paper 3D Multi-Robot Patrolling with a Two-Level Coordination Strategy (just appeared in Autonomous Robots) and
Read more
The final Review of the FP7 TRADR project took place at an industrial site in Mestre, Italy, under the great
Read more
On November 17 2017, I was a member of the crew who organized the TRADR Technology Day. More than 60
Read more
It was a great life experience being part of the TRADR team who successfully deployed two UGVs and three drones
Read moreMy Google Scholar profile International Journal Papers 3D Multi-Robot Patrolling with a
Read more