PLVS code released
I am happy to release the code of my project PLVS. PLVS is a real-time system that leverages sparse RGB-D and Stereo SLAM, volumetric mapping, and
Read MoreRobotics & Computer Vision Engineer, PhD
I am happy to release the code of my project PLVS. PLVS is a real-time system that leverages sparse RGB-D and Stereo SLAM, volumetric mapping, and
Read More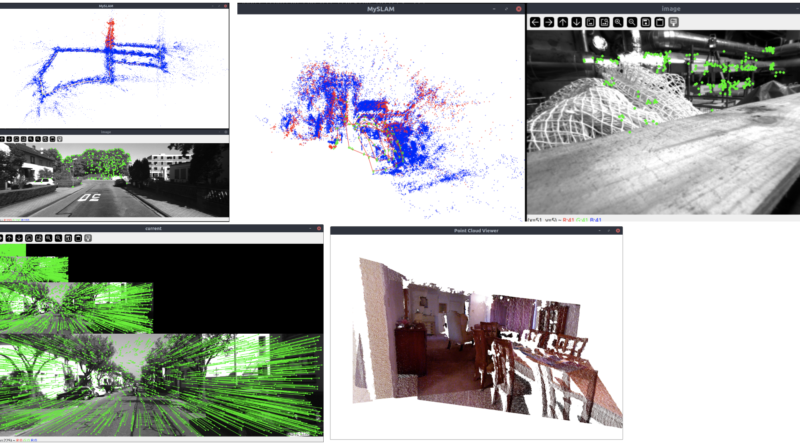
If you love to play with SLAM like me, I shared slamplay on github: https://github.com/luigifreda/slamplay. slamplay is a collection of powerful
Read More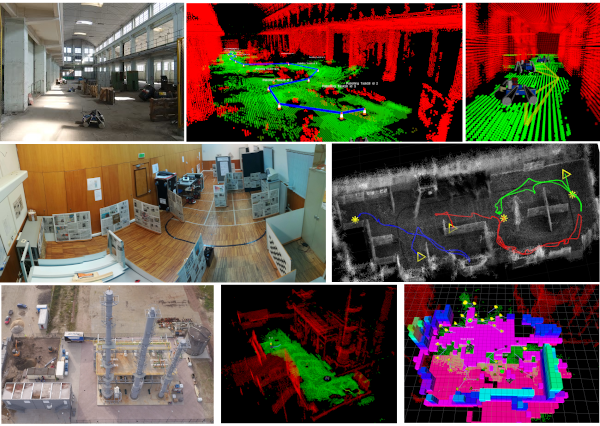
Check out the new 3DMR project on 3D multi-robot exploration in collaboration with Prof. Rui Rocha, David Portugal, and Tiago
Read More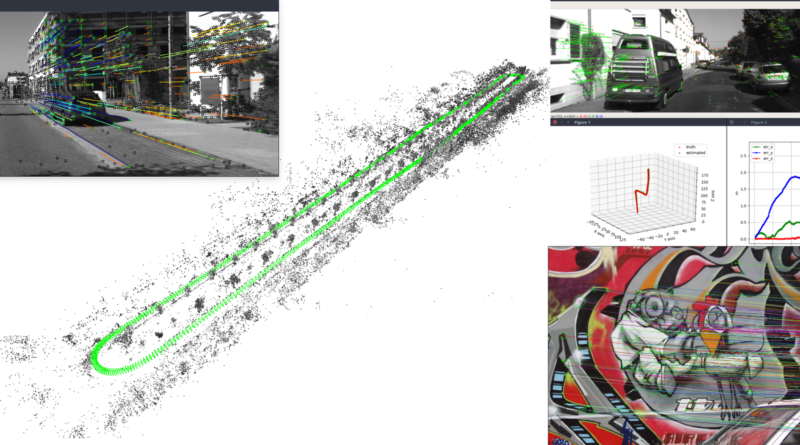
I am excited to release pySLAM v2. The new version allows you to play with SLAM techniques, visual-odometry, keyframes, bundle-adjustment,
Read More
I’m very pleased to serve as a member of the Program Committee of the IRMAS – Intelligent Robotics and Multi-Agent
Read More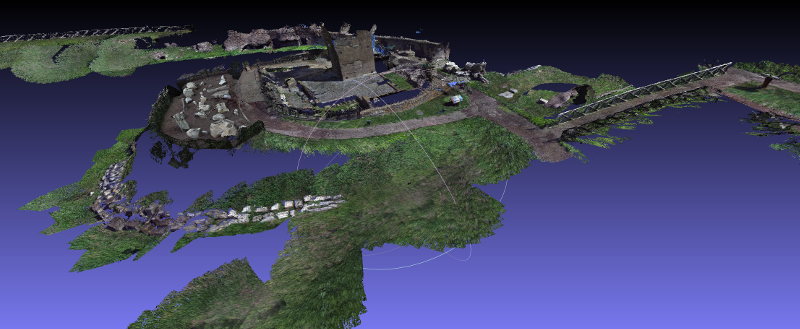
If you are visiting Rome, now you can go to the Circus Maximus and enjoy a great Mixed-Reality experience. An
Read More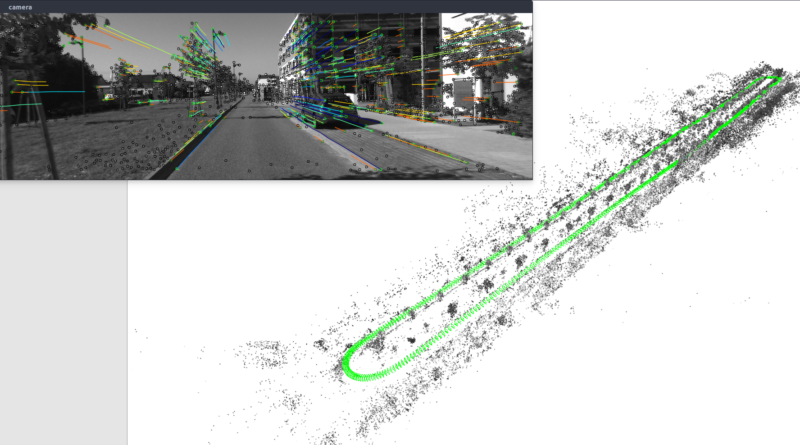
On February 2019, I was the teacher of the course Visual Perception and Spatial Computing in the Advanced School of AI. This school
Read More
I am very excited to release the paper 3D Multi-Robot Patrolling with a Two-Level Coordination Strategy (just appeared in Autonomous Robots) and
Read More
Since June 2018, I am an IEEE Senior Member. If you’re curious, you can find here some information about IEEE
Read More
I am working hard during my free time and having fun with PLVS to finalize the outcoming paper: PLVS: An
Read More
From May 2018 I am Chief Research Officer at Inglobe Technologies. I will lead R&D activities on Computer Vision, Machine
Read More
The final Review of the FP7 TRADR project took place at an industrial site in Mestre, Italy, under the great
Read More
On November 17 2017, I was a member of the crew who organized the TRADR Technology Day. More than 60
Read More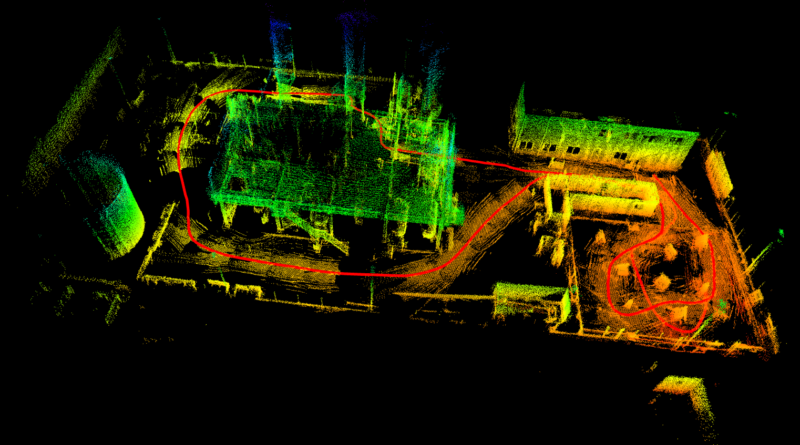
From November 6th to November 17th, I took part to the fourth TRADR Evaluation Exercise in Rotterdam. The full TRADR system was evaluated by the GB firefighters end-users
Read More
On September 17 2017, I was with the Alcor and TRADR teams in Piombino, for the European Robotics League event. We gave
Read More