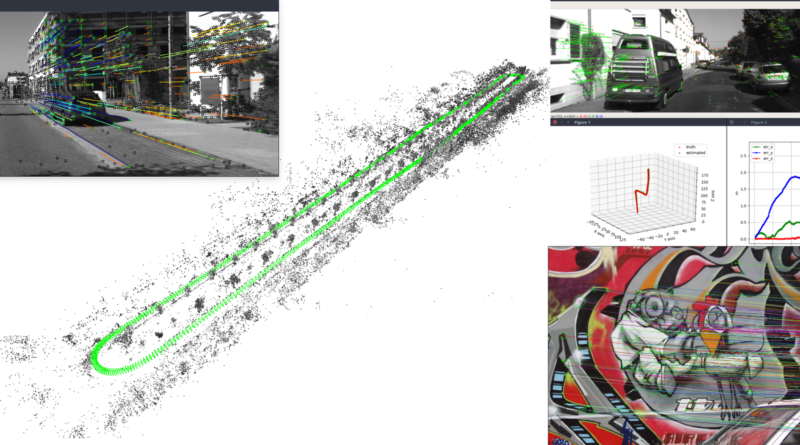
My new pySLAM v2 is out!
I am excited to release pySLAM v2. The new version allows you to play with SLAM techniques, visual-odometry, keyframes, bundle-adjustment,
Read MoreRobotics & Computer Vision Engineer, PhD
I am excited to release pySLAM v2. The new version allows you to play with SLAM techniques, visual-odometry, keyframes, bundle-adjustment,
Read More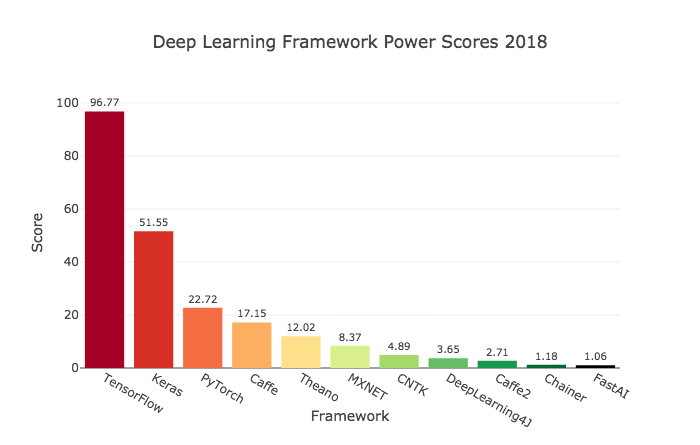
In this very nice article, Jeff compares all the hottest deep learning frameworks that are used in the Academic and
Read More
In this page, the Authors K. Tateno, F. Tombari, I. Laina and N. Navab present the following paper in which CNNs are used
Read More
In this post, Torsten Sattler presents his upcoming CVPR 2017 paper “Comparative Evaluation of Hand-Crafted and Learned Local Features” You
Read More
Micheal Milford explains how to make a driverless car see the road ahead. From his Google+ post: “We were asked to
Read More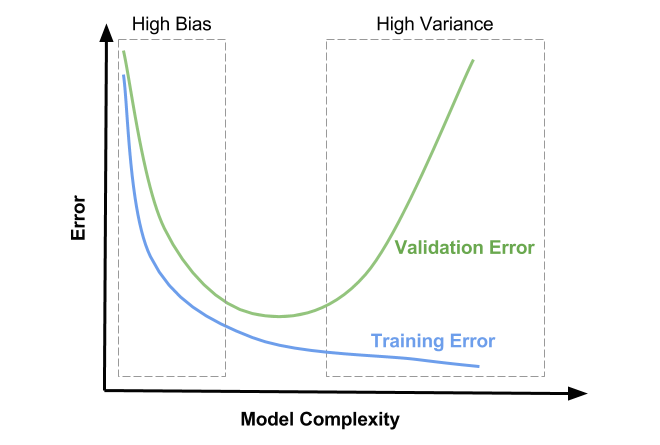
This very nice post clearly explains the bias and variance tradeoff http://www.learnopencv.com/bias-variance-tradeoff-in-machine-learning/ This tradeoff can be mathematically stated by the
Read More
This post explains a trick which allows us to convert neural network outputs into probabilities, with no cost to performance,
Read More
This post presents an interesting summary of the RSS 2016 Workshop Here you can fine official page and description of the
Read More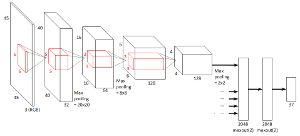
Tiny-CNN is an header-only, dependency-free deep learning framework for C++11. Just include tiny_cnn.h and write your model in C++. There is
Read More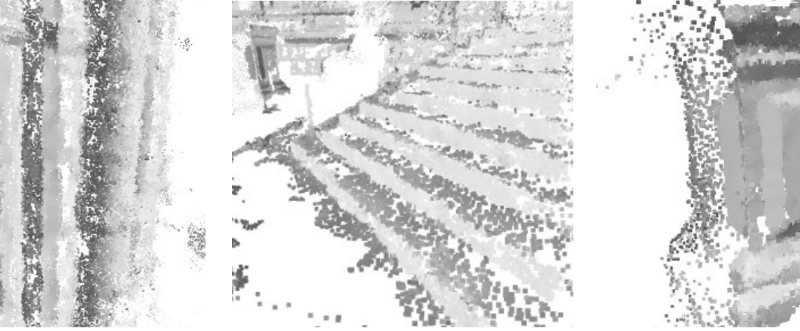
Normal estimation in point clouds is a crucial first step for numerous algorithms, from surface reconstruction and scene understanding to
Read More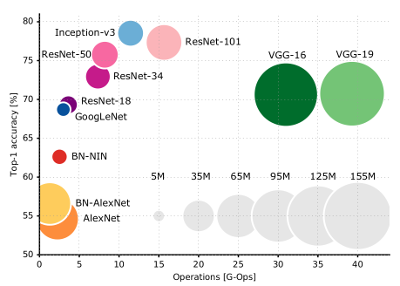
From Eugenio Curlurciello’s blog, Professor at Purdue University, you can find here a post about the the history of neural network design
Read MoreHere you can find a fantastic post on reinforcement learning by Andrej Karpathy. The Author explains how it is possible
Read More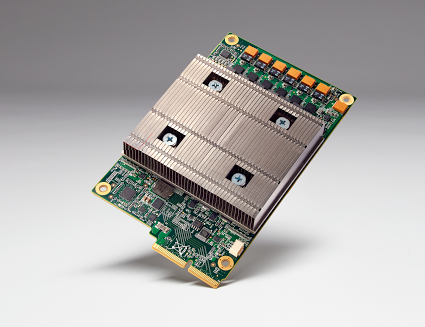
Google revealed the TPU (Tensor Processing Unit), a custom ASIC designed and built specifically for machine learning applications.
Read More
Movidius (innovative Irish chip maker) has just created the world’s first deep learning USB stick. Entitled the Fathom Neural Compute Stick,
Read MoreA new work of Lepetit and Fua about learning invariant feature trasform http://arxiv.org/abs/1603.09114
Read More