pyslam v2.1 is available
I am happy to share the new version of pyslam: v2.1. It comes with new improvements and the following new
Read moreRobotics & Computer Vision Engineer, PhD

I am happy to share the new version of pyslam: v2.1. It comes with new improvements and the following new
Read more
I am happy to release the code of my project PLVS. PLVS is a real-time system that leverages sparse RGB-D and Stereo SLAM, volumetric mapping, and
Read more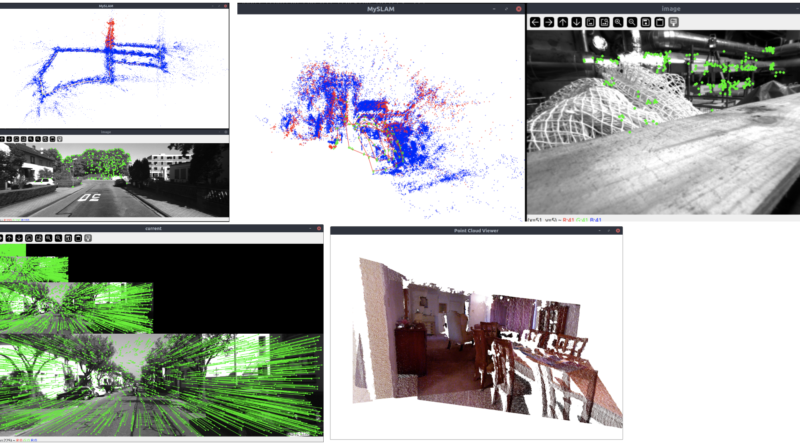
If you love to play with SLAM like me, I shared slamplay on github: https://github.com/luigifreda/slamplay. slamplay is a collection of powerful
Read more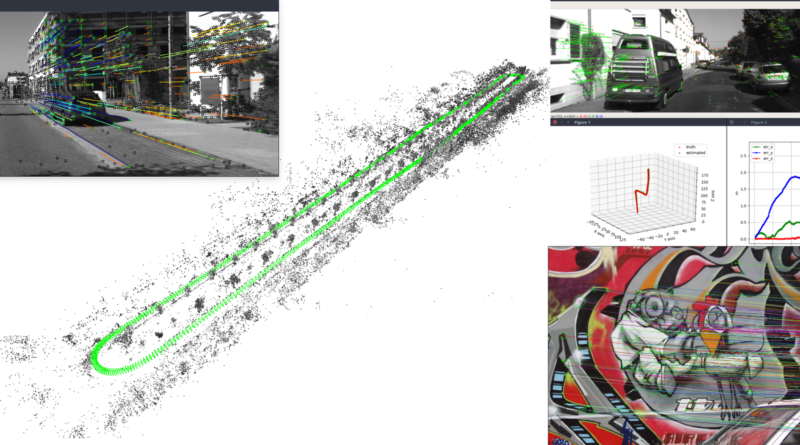
I am excited to release pySLAM v2. The new version allows you to play with SLAM techniques, visual-odometry, keyframes, bundle-adjustment,
Read more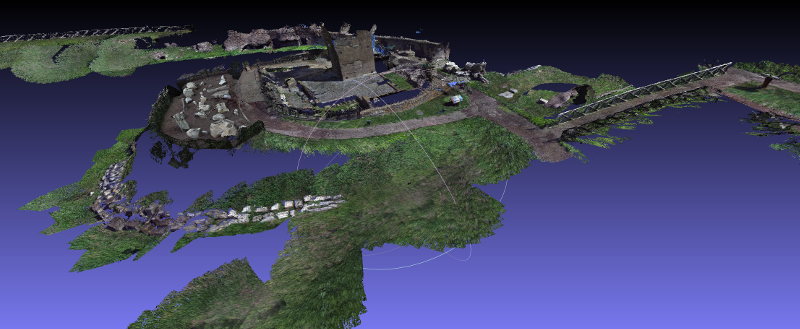
If you are visiting Rome, now you can go to the Circus Maximus and enjoy a great Mixed-Reality experience. An
Read morePLVS(*) is a real-time system that leverages sparse RGB-D and Stereo SLAM, volumetric mapping, and 3D unsupervised incremental segmentation. PLVS
Read more
In this page, the Authors K. Tateno, F. Tombari, I. Laina and N. Navab present the following paper in which CNNs are used
Read more
In this post, Alejo Concha Belenguer presents his new work RGBDTAM. This is a direct SLAM pipeline that runs in real-time and
Read more
Using Microsoft HoloLens, 24,000+ service technicians of Thyssenkrupp will be able to visualize and identify problems with elevators ahead of
Read more
A new journal paper about ElasticFusion has come out from Davison’s group. New exciting results on 3D light source mapping are presented.
Read more
A new exciting work from the Computer Vision Group of TUM. “DSO is a novel direct and sparse formulation for
Read more
The slamcore start-up is pioneering breaktrough new algorithms for accurate and robust real-time event camera motion tracking and scene reconstruction
Read more
In this work, Researchers of MIT present an high-performance and tunable stereo disparity estimation method. It succeeds to reach a
Read more
A new open-source library has been released by the Robotics and Perception Group of Davide Scaramuzza. Technical details of the
Read more
Everyone knows about Google Map and use it. But now the internet giant has a bigger target: it wants to digitally map
Read more