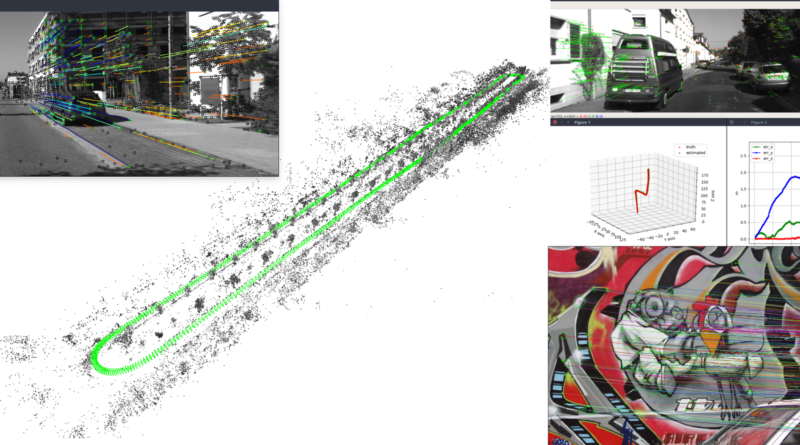
My new pySLAM v2 is out!
I am excited to release pySLAM v2. The new version allows you to play with SLAM techniques, visual-odometry, keyframes, bundle-adjustment,
Read moreRobotics & Computer Vision Engineer, PhD
I am excited to release pySLAM v2. The new version allows you to play with SLAM techniques, visual-odometry, keyframes, bundle-adjustment,
Read more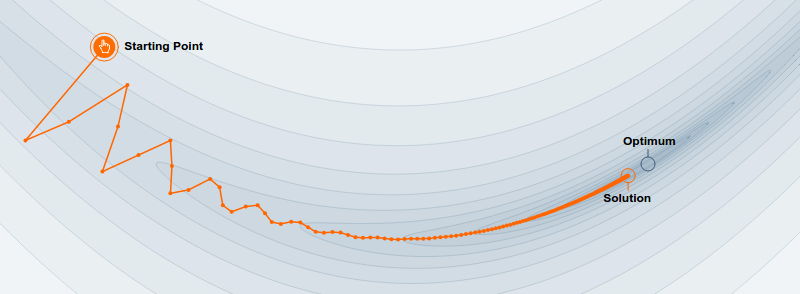
This post explains why momentum works in optimization. Nice interactive images are used to this aim. Here you can find another
Read more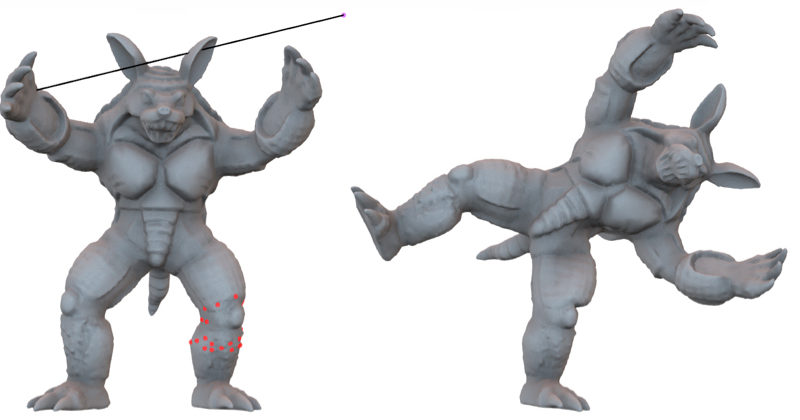
“Many graphics and vision problems are naturally expressed as optimizations with either linear or non-linear least squares objective functions over
Read more
In this very nice post you can find the story of the average and the median and how the use
Read more