pyslam v2.1 is available
I am happy to share the new version of pyslam: v2.1. It comes with new improvements and the following new
Read moreRobotics & Computer Vision Engineer, PhD

I am happy to share the new version of pyslam: v2.1. It comes with new improvements and the following new
Read more
I am happy to release the code of my project PLVS. PLVS is a real-time system that leverages sparse RGB-D and Stereo SLAM, volumetric mapping, and
Read more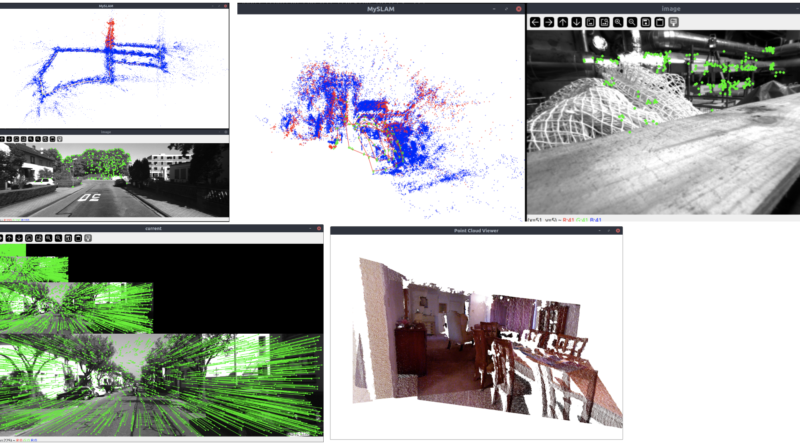
If you love to play with SLAM like me, I shared slamplay on github: https://github.com/luigifreda/slamplay. slamplay is a collection of powerful
Read more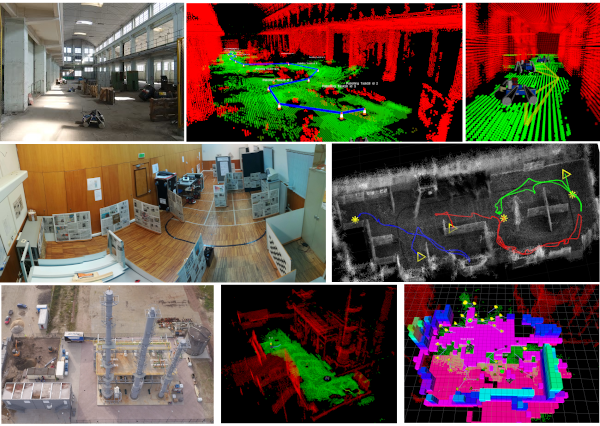
Check out the new 3DMR project on 3D multi-robot exploration in collaboration with Prof. Rui Rocha, David Portugal, and Tiago
Read more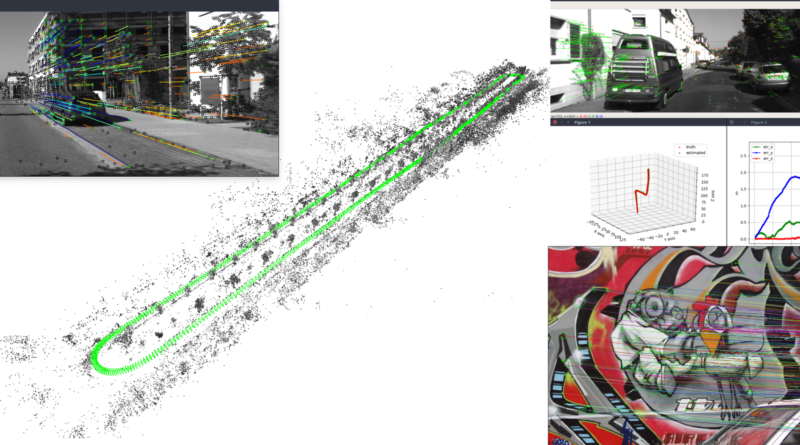
I am excited to release pySLAM v2. The new version allows you to play with SLAM techniques, visual-odometry, keyframes, bundle-adjustment,
Read more
I’m very pleased to serve as a member of the Program Committee of the IRMAS – Intelligent Robotics and Multi-Agent
Read more
I am working hard during my free time and having fun with PLVS to finalize the outcoming paper: PLVS: An
Read morePLVS(*) is a real-time system that leverages sparse RGB-D and Stereo SLAM, volumetric mapping, and 3D unsupervised incremental segmentation. PLVS
Read more
From May 2018 I am Chief Research Officer at Inglobe Technologies. I will lead R&D activities on Computer Vision, Machine
Read more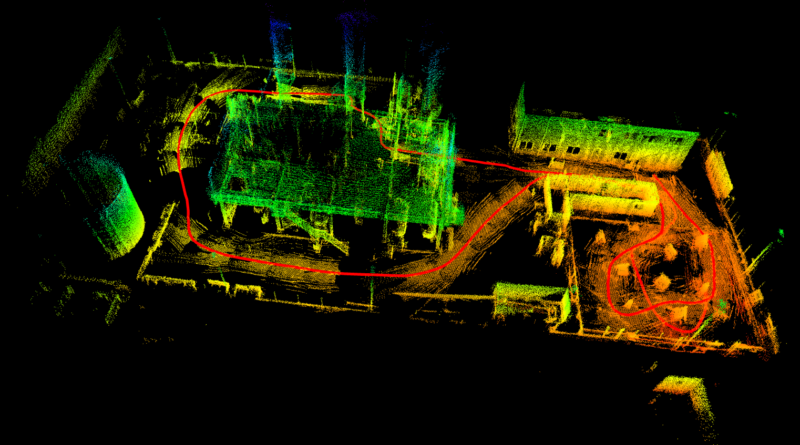
From November 6th to November 17th, I took part to the fourth TRADR Evaluation Exercise in Rotterdam. The full TRADR system was evaluated by the GB firefighters end-users
Read more
The TRADR EU project is on Euronews. The video report shows the simulated disaster scene we used in the last
Read more
In this page, the Authors K. Tateno, F. Tombari, I. Laina and N. Navab present the following paper in which CNNs are used
Read more
In this post, Torsten Sattler presents his upcoming CVPR 2017 paper “Comparative Evaluation of Hand-Crafted and Learned Local Features”
Read more
Handle is definitely a big Wow. From the youtube video description: “Handle is a research robot that stands 6.5 ft
Read more
Micheal Milford explains how to make a driverless car see the road ahead. From his Google+ post: “We were asked to
Read more