pyslam v2.1 is available
I am happy to share the new version of pyslam: v2.1. It comes with new improvements and the following new
Read moreRobotics & Computer Vision Engineer, PhD

I am happy to share the new version of pyslam: v2.1. It comes with new improvements and the following new
Read more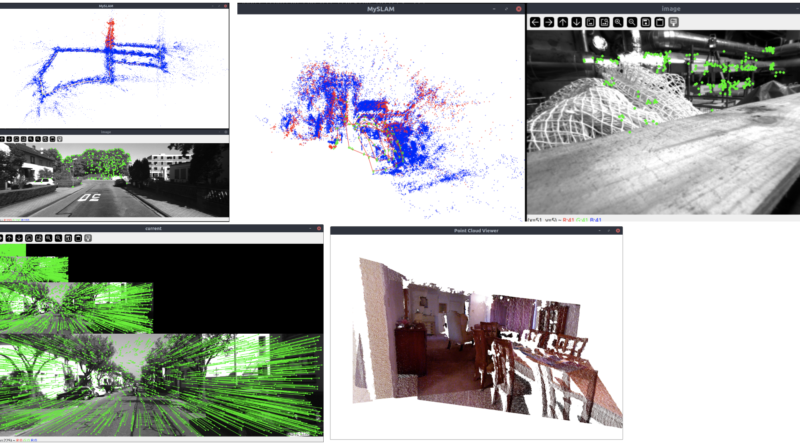
If you love to play with SLAM like me, I shared slamplay on github: https://github.com/luigifreda/slamplay. slamplay is a collection of powerful
Read more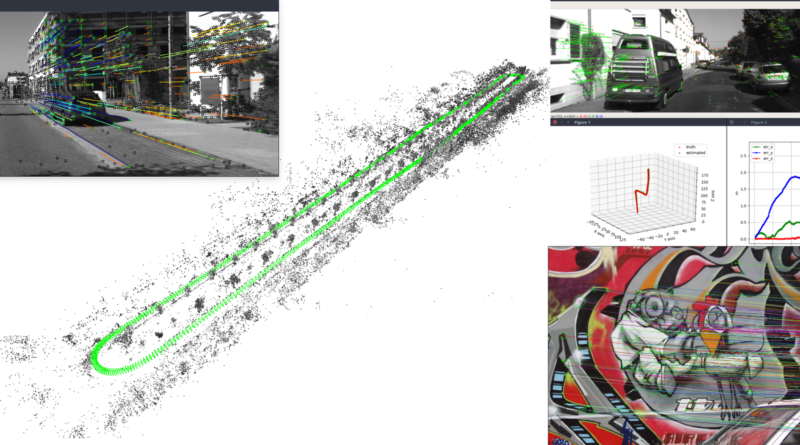
I am excited to release pySLAM v2. The new version allows you to play with SLAM techniques, visual-odometry, keyframes, bundle-adjustment,
Read more
A new work of Lepetit and Fua about learning invariant feature trasform http://arxiv.org/abs/1603.09114
Read more