PLVS code released
I am happy to release the code of my project PLVS. PLVS is a real-time system that leverages sparse RGB-D and Stereo SLAM, volumetric mapping, and
Read MoreRobotics & Computer Vision Engineer, PhD
I am happy to release the code of my project PLVS. PLVS is a real-time system that leverages sparse RGB-D and Stereo SLAM, volumetric mapping, and
Read More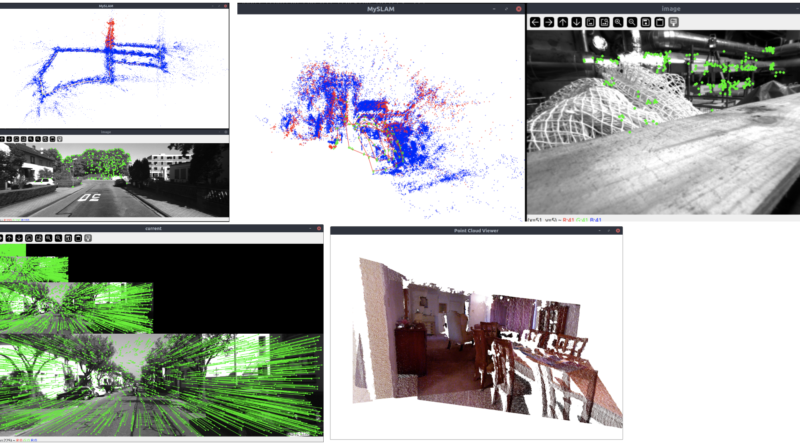
If you love to play with SLAM like me, I shared slamplay on github: https://github.com/luigifreda/slamplay. slamplay is a collection of powerful
Read More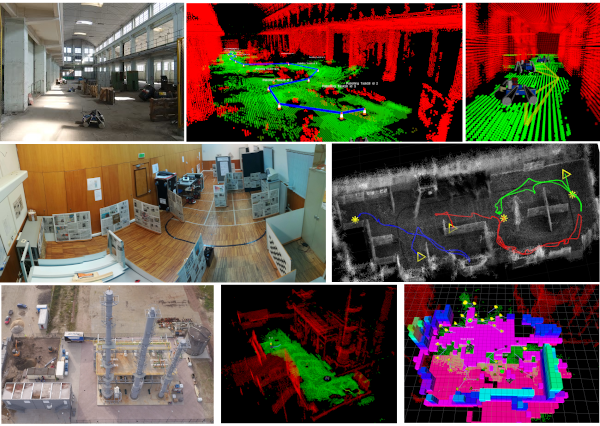
Check out the new 3DMR project on 3D multi-robot exploration in collaboration with Prof. Rui Rocha, David Portugal, and Tiago
Read More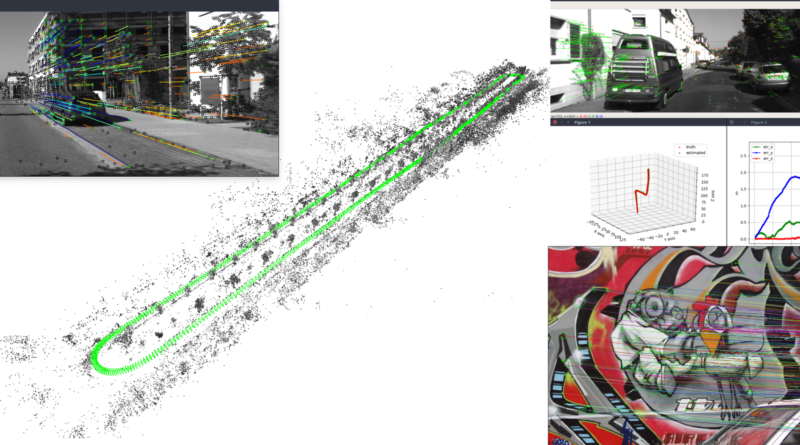
I am excited to release pySLAM v2. The new version allows you to play with SLAM techniques, visual-odometry, keyframes, bundle-adjustment,
Read More
code: https://github.com/luigifreda/ROSIntegration (fork) new: now this fork has been merged into the original repo https://github.com/code-iai/ROSIntegration I recently succeeded in porting the ROSIntegration
Read More
I’m very pleased to serve as a member of the Program Committee of the IRMAS – Intelligent Robotics and Multi-Agent
Read More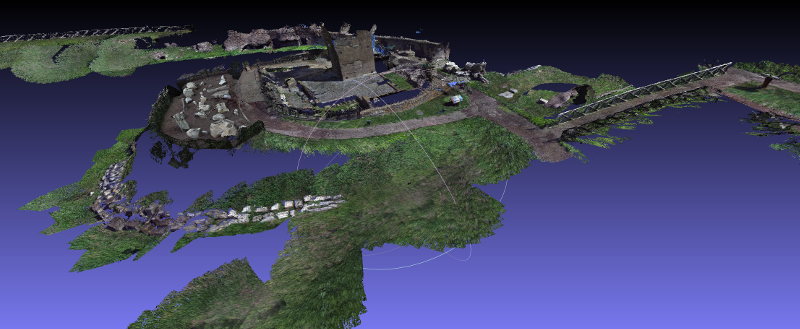
If you are visiting Rome, now you can go to the Circus Maximus and enjoy a great Mixed-Reality experience. An
Read More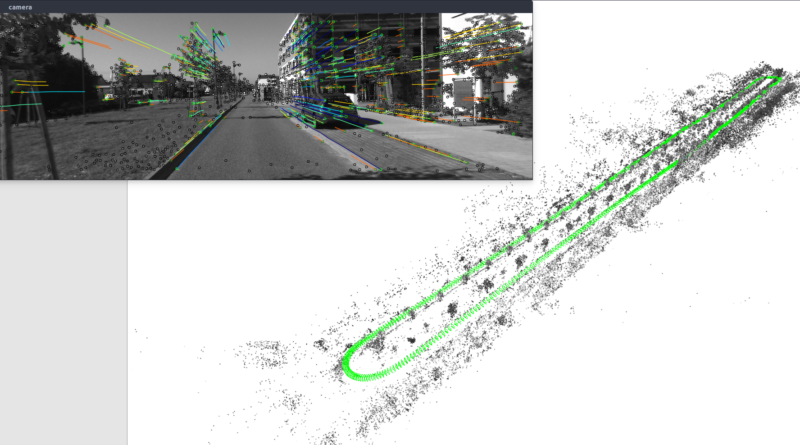
On February 2019, I was the teacher of the course Visual Perception and Spatial Computing in the Advanced School of AI. This school
Read More
I am very excited to release the paper 3D Multi-Robot Patrolling with a Two-Level Coordination Strategy (just appeared in Autonomous Robots) and
Read More
I am working hard during my free time and having fun with PLVS to finalize the outcoming paper: PLVS: An
Read More
In this post, Alejo Concha Belenguer presents his new work RGBDTAM. This is a direct SLAM pipeline that runs in real-time and
Read More
A new journal paper about ElasticFusion has come out from Davison’s group. New exciting results on 3D light source mapping are presented.
Read More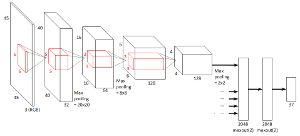
Tiny-CNN is an header-only, dependency-free deep learning framework for C++11. Just include tiny_cnn.h and write your model in C++. There is
Read More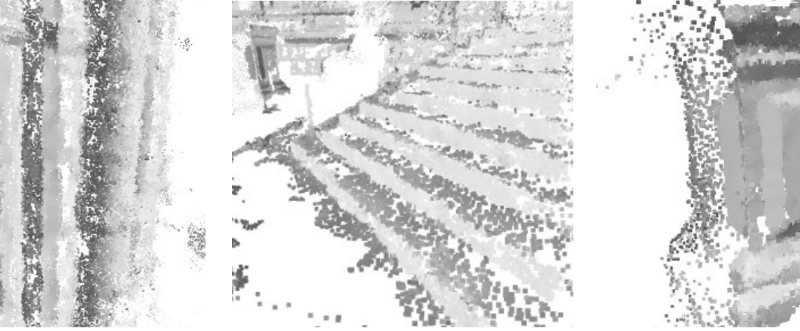
Normal estimation in point clouds is a crucial first step for numerous algorithms, from surface reconstruction and scene understanding to
Read More