My new pySLAM v2 is out!
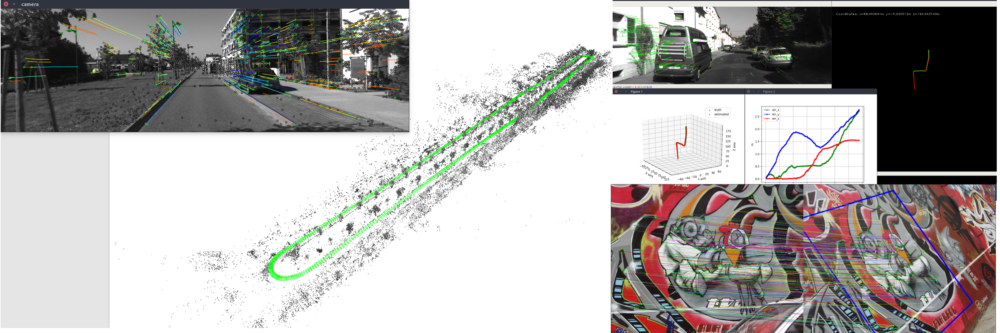
I am excited to release pySLAM v2. The new version allows you to play with SLAM techniques, visual-odometry, keyframes, bundle-adjustment, feature-matching, and many modern local features (based on new Deep Learning approaches). It was a long work to make everything accessible from a single python environment but it was worth it!
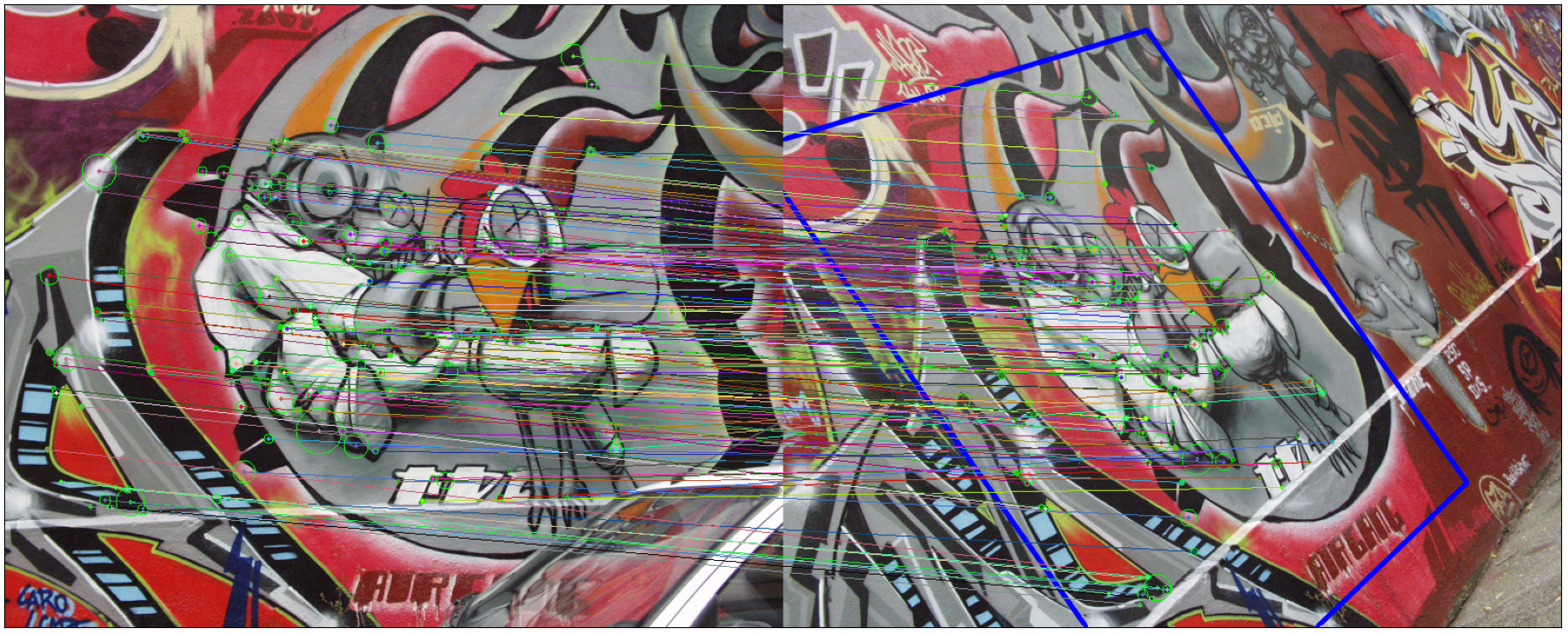
Now, you can easily test how many modern local features perform and compare with respect to classical ones, within a pure feature matching application or a within a SLAM/Visual-odometry pipeline. At the present time, the following feature detectors are supported:
- FAST
- Good features to track
- ORB
- ORB2 (improvements of ORB-SLAM2 to ORB detector)
- SIFT
- SURF
- KAZE
- AKAZE
- BRISK
- AGAST
- MSER
- StarDector/CenSurE
- Harris-Laplace
- SuperPoint
- D2-Net
- DELF
- Contextdesc
- LFNet
- R2D2
- Key.Net
The following feature descriptors are supported:
- ORB
- SIFT
- ROOT SIFT
- SURF
- AKAZE
- BRISK
- FREAK
- SuperPoint
- Tfeat
- BOOST_DESC
- DAISY
- LATCH
- LUCID
- VGG
- Hardnet
- GeoDesc
- SOSNet
- L2Net
- Log-polar descriptor
- D2-Net
- DELF
- Contextdesc
- LFNet
- R2D2
You can find more information in the file feature_types.py.
A serious benchmarking is still a work in progress.
Source code:
https://github.com/luigifreda/pyslam
Check my related tweet with people’s comments, etc.
I am excited to release pySLAM v2. Now you can play with #SLAM techniques, #VisualOdometry, #Keyframes, #BundleAdjustment, #FeatureMatching, and many modern #LocalFeatures (based on DL). Everything is accessible from a single #python environment. https://t.co/XEPiuvnXJG pic.twitter.com/6K5yi5Z2G1
— Luigi Freda (@LuigiFreda) May 4, 2020

Hi, awesome project, thank you for publishing the code.
Is there any kind of tutorial on how to run the code on Windows?
Hi, thank you very much! Unfortunately, I didn’t develop pyslam under windows since many on the dependencies are not designed or guaranteed to work under Windows. In any case, you can try to install it under Windows with WSL2 (it allows to install ubuntu with a fast GUI): see for instance this link https://www.youtube.com/watch?v=IL7Jd9rjgrM
Didn’t test it yet though. WIP…