slamplay is ready!
If you love to play with SLAM like me, I shared slamplay on github: https://github.com/luigifreda/slamplay.
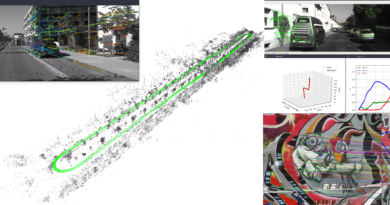
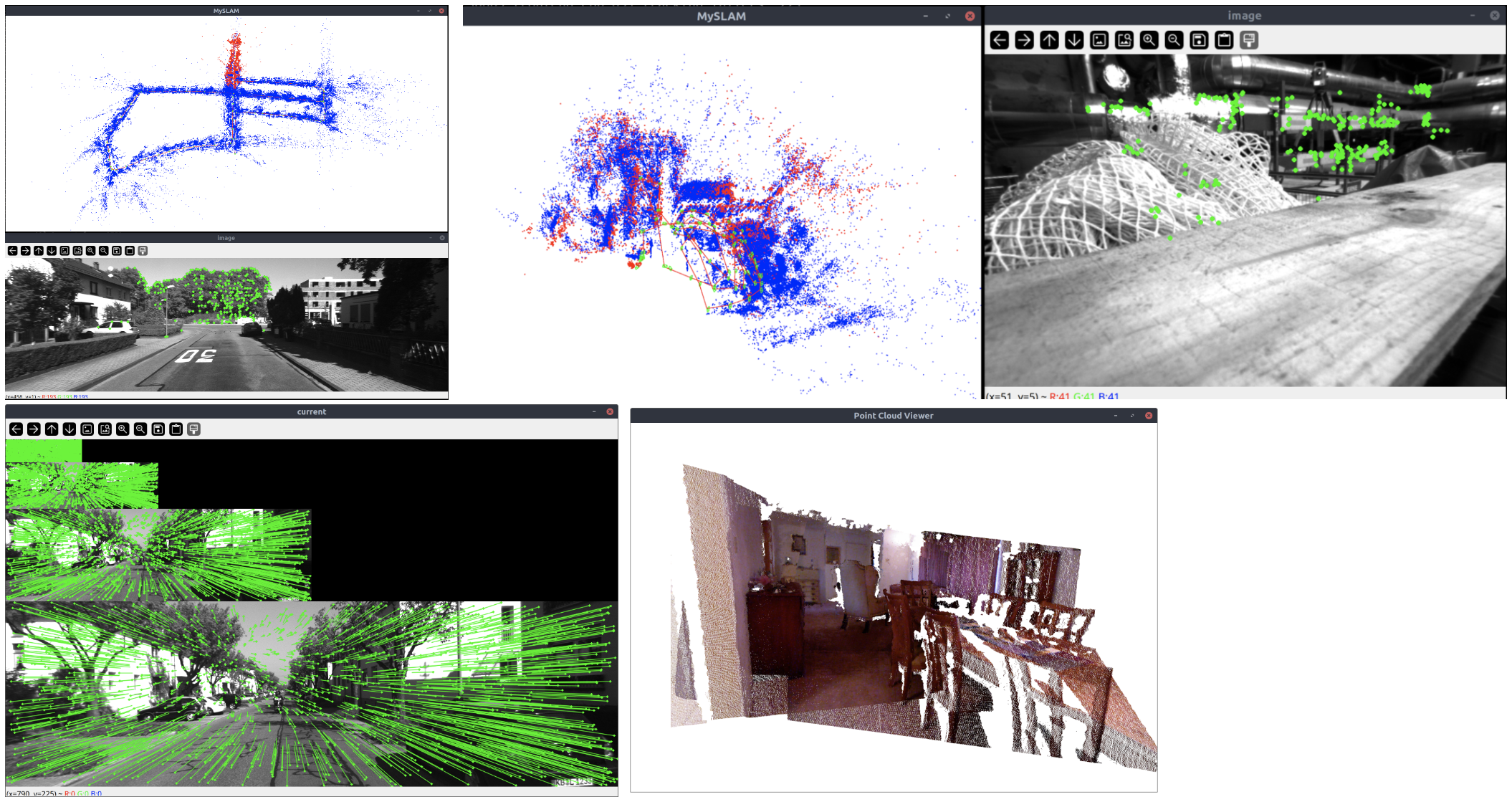
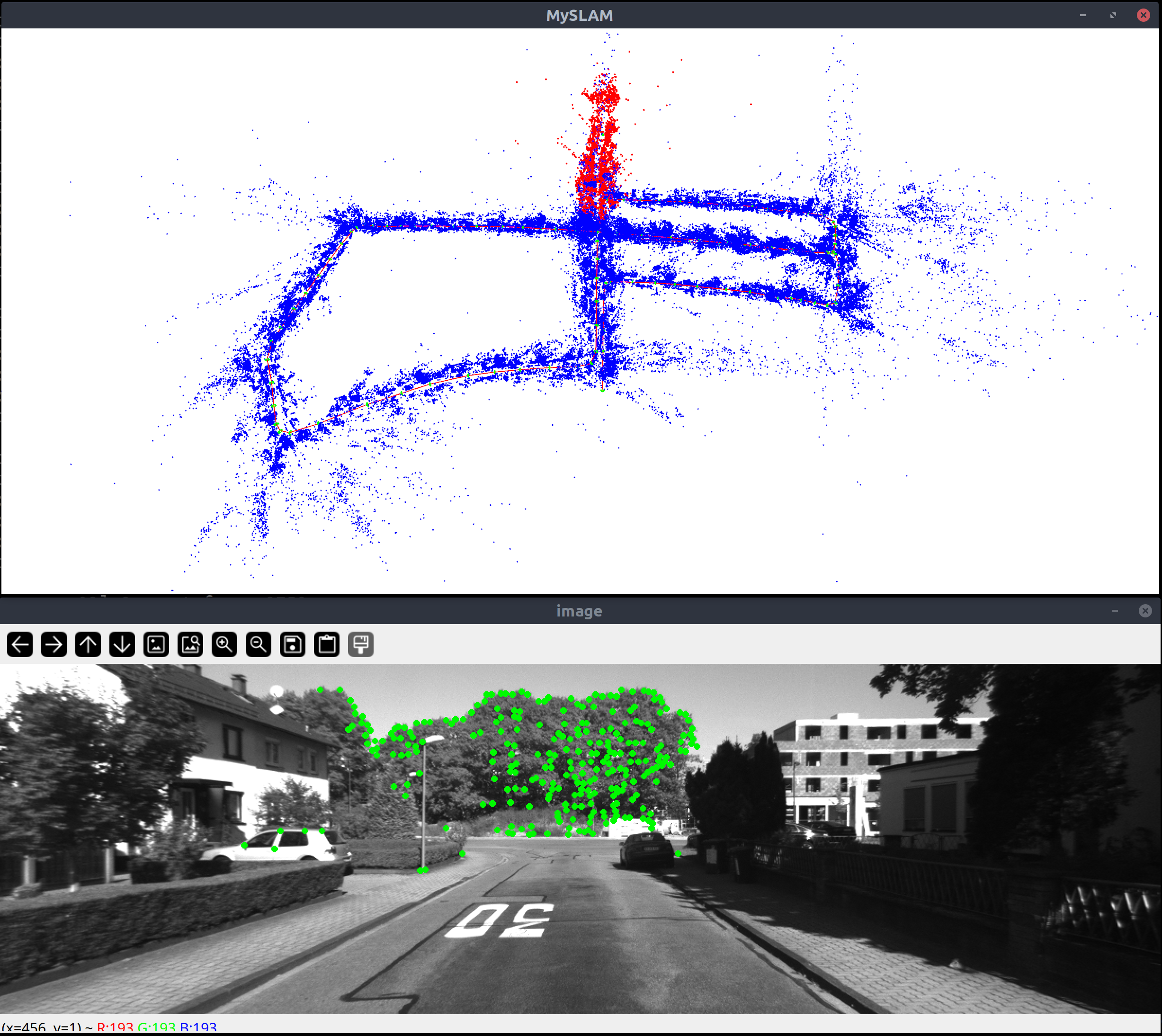
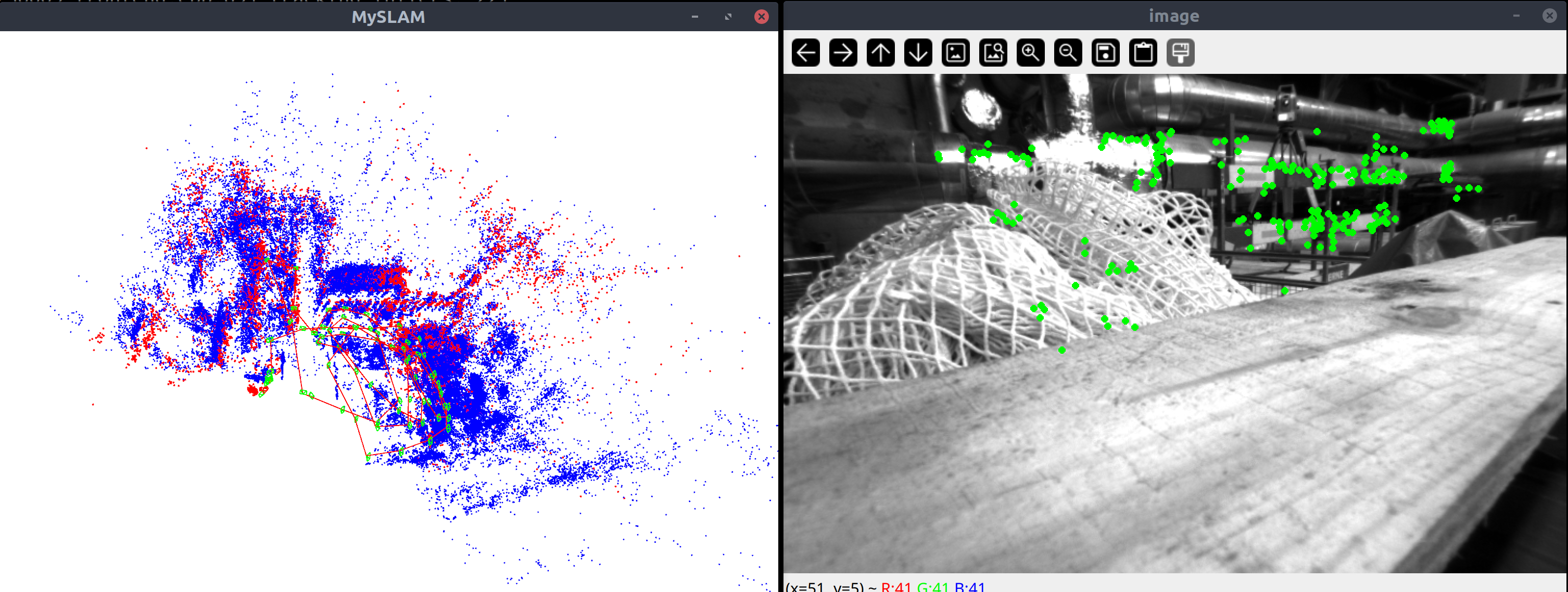
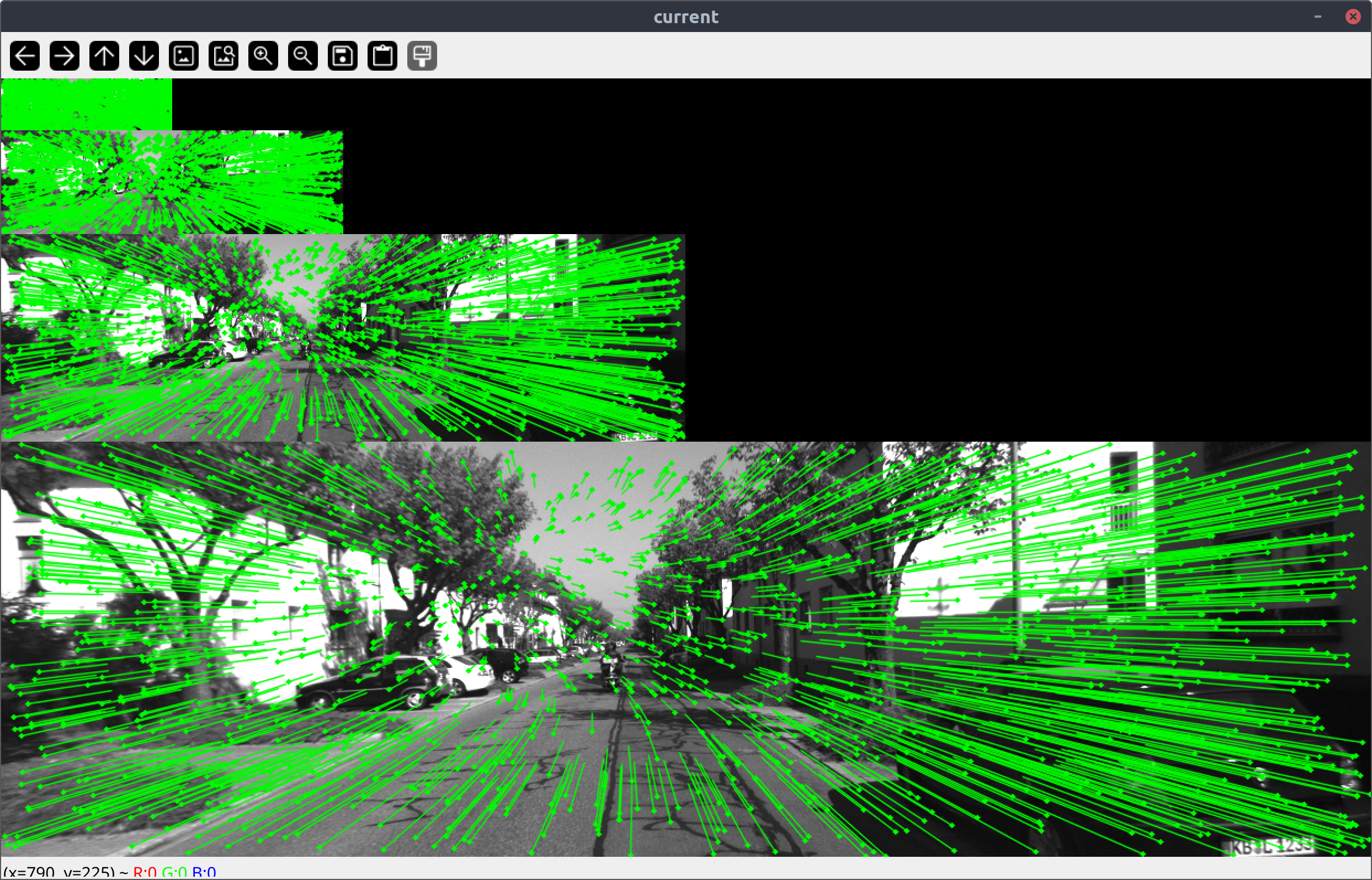
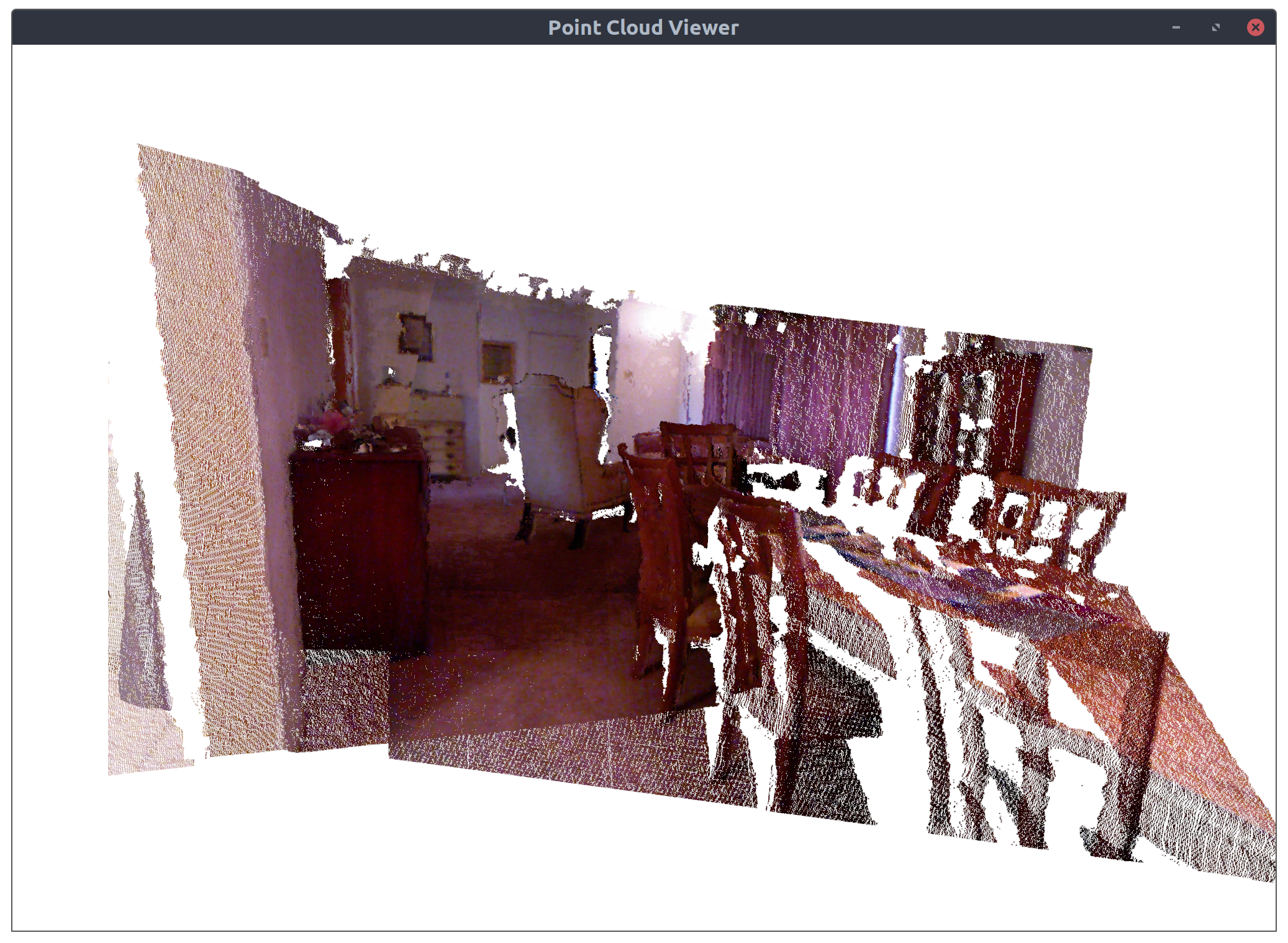
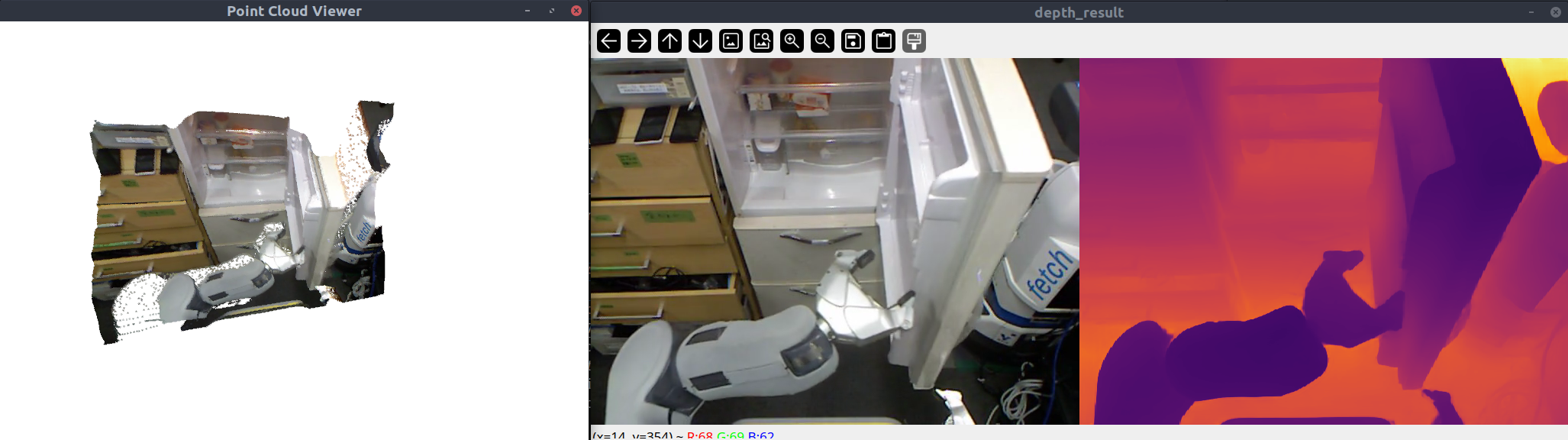
slamplay is a collection of powerful tools to start playing and experimenting with SLAM in C++. It’s a work in progress. It installs and makes available in a single cmake framework some of the most important
- back-end frameworks (g2o, gtsam, ceres, se-sync, etc.),
- front-end tools (opencv, pcl, etc.),
- algebra and geometry libs (eigen, sophus, cholmod, etc.),
- viz tools (pangolin, imgui, etc.),
- loop-closure frameworks (DBOW3, iBOW, etc.),
- deep learning tools (based on TensorRT, tensorflow_cc, etc.),
along with some nice examples to easily and quickly start with all these tools.
I created slamplay for a computer vision class I recently taught. I started developing it for fun, during my free time, taking inspiration from some repositories available on the web.
This is my related post on X:
If you love to play with SLAM like me, I shared slamplay on github: https://t.co/gRkCAd9eIK
A playground for C++ SLAM algorithms. Many backend, frontend, viz tools are combined and live together in single framework.— Luigi Freda (@LuigiFreda) September 30, 2023