PLVS code released
I am happy to release the code of my project PLVS. PLVS is a real-time system that leverages sparse RGB-D and Stereo SLAM, volumetric mapping, and
Read MoreRobotics & Computer Vision Engineer, PhD
I am happy to release the code of my project PLVS. PLVS is a real-time system that leverages sparse RGB-D and Stereo SLAM, volumetric mapping, and
Read More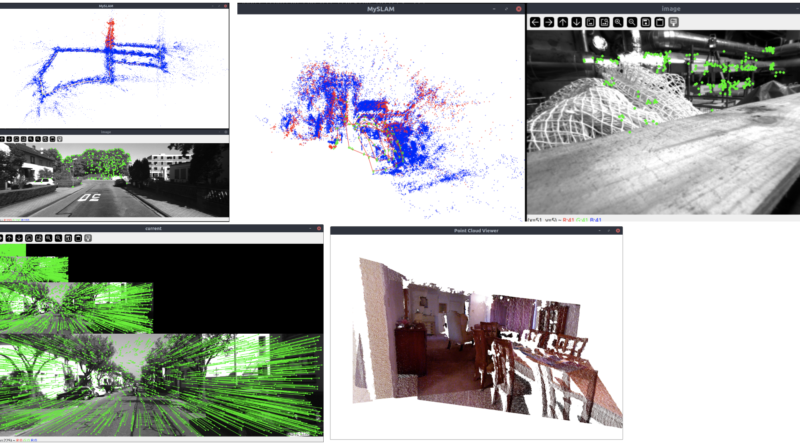
If you love to play with SLAM like me, I shared slamplay on github: https://github.com/luigifreda/slamplay. slamplay is a collection of powerful
Read More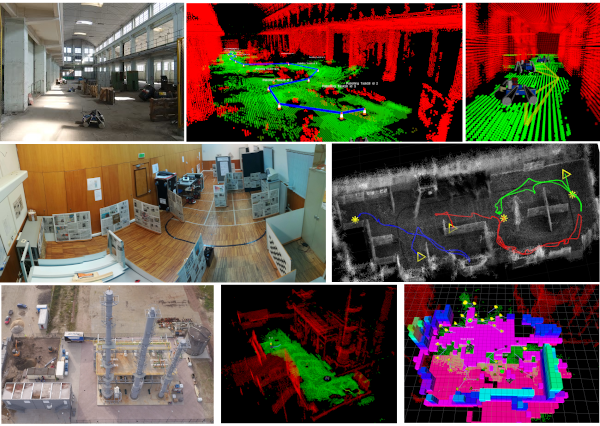
Check out the new 3DMR project on 3D multi-robot exploration in collaboration with Prof. Rui Rocha, David Portugal, and Tiago
Read More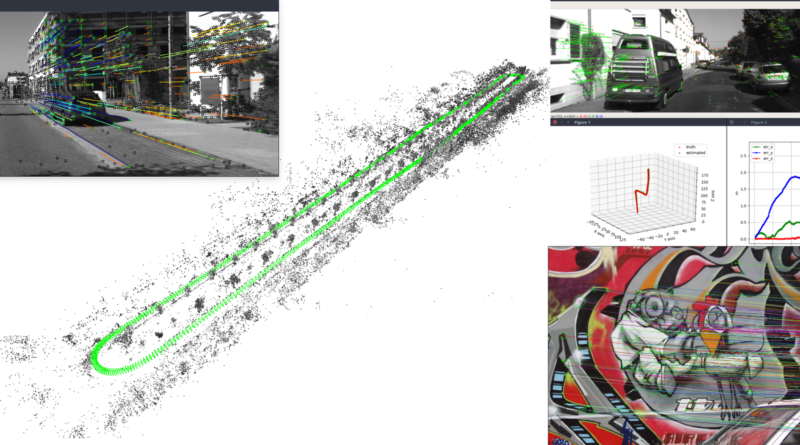
I am excited to release pySLAM v2. The new version allows you to play with SLAM techniques, visual-odometry, keyframes, bundle-adjustment,
Read More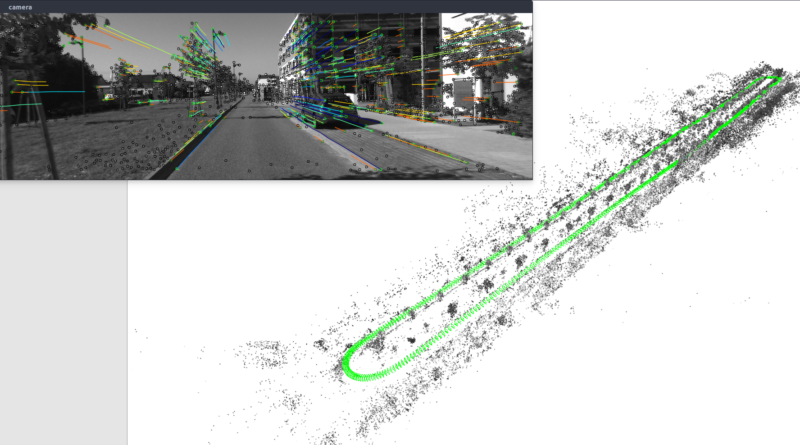
On February 2019, I was the teacher of the course Visual Perception and Spatial Computing in the Advanced School of AI. This school
Read More
I am very excited to release the paper 3D Multi-Robot Patrolling with a Two-Level Coordination Strategy (just appeared in Autonomous Robots) and
Read More
From May 2018 I am Chief Research Officer at Inglobe Technologies. I will lead R&D activities on Computer Vision, Machine
Read More
In this page, the Authors K. Tateno, F. Tombari, I. Laina and N. Navab present the following paper in which CNNs are used
Read More
In this post, Torsten Sattler presents his upcoming CVPR 2017 paper “Comparative Evaluation of Hand-Crafted and Learned Local Features” You
Read More
Micheal Milford explains how to make a driverless car see the road ahead. From his Google+ post: “We were asked to
Read More
In this post, Alejo Concha Belenguer presents his new work RGBDTAM. This is a direct SLAM pipeline that runs in real-time and
Read More
A nice meka with the option to engage AR battles
Read More
Using Microsoft HoloLens, 24,000+ service technicians of Thyssenkrupp will be able to visualize and identify problems with elevators ahead of
Read More
Uber is definitely stepping on the accelerator… “Starting later this month, Uber will allow customers in downtown Pittsburgh to summon
Read More
A new journal paper about ElasticFusion has come out from Davison’s group. New exciting results on 3D light source mapping are presented.
Read More