Direct Sparse Odometry
A new exciting work from the Computer Vision Group of TUM. “DSO is a novel direct and sparse formulation for
Read MoreRobotics & Computer Vision Engineer, PhD
A new exciting work from the Computer Vision Group of TUM. “DSO is a novel direct and sparse formulation for
Read More
The slamcore start-up is pioneering breaktrough new algorithms for accurate and robust real-time event camera motion tracking and scene reconstruction
Read More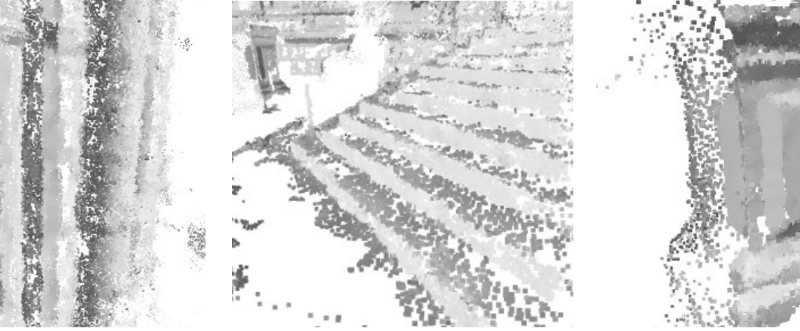
Normal estimation in point clouds is a crucial first step for numerous algorithms, from surface reconstruction and scene understanding to
Read More
Progressive multiview stero is an implementation of an algorihm taking a sparse 3D model (result of structure from motion software)
Read More
In this work, Researchers of MIT present an high-performance and tunable stereo disparity estimation method. It succeeds to reach a
Read More
How about asking your robot to make a complete laundry cycle?…PR2 seems almost there. See more on this page.
Read More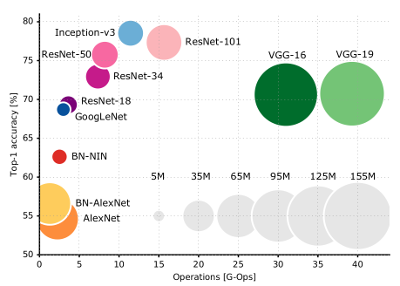
From Eugenio Curlurciello’s blog, Professor at Purdue University, you can find here a post about the the history of neural network design
Read More
From the webpage of the project “This paper presents a novel probabilistic foundation for volumetric 3-d reconstruction. We formulate the problem as
Read More
A new open-source library has been released by the Robotics and Perception Group of Davide Scaramuzza. Technical details of the
Read More
OpenCV originated at Intel, and is now back at Intel. People wonder about the possibility that OpenCV can stop beeing
Read More
“Hyper-Reality (total runtime approx 6 minutes) is a concept film by Keiichi Matsuda. It presents a provocative and kaleidoscopic new
Read More
An interesting work from CMU. A spatiotemporal cost function is defined in order to jointly estimates both the spatiotemporal camera
Read More
Everyone knows about Google Map and use it. But now the internet giant has a bigger target: it wants to digitally map
Read More
This video shows how the new RealSense R200 can be used for 2D mapping and navigation for TutleBot. Drivers & ROS
Read More