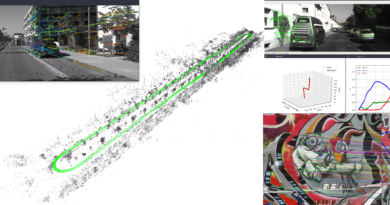
Active Volumetric 3D Reconstruction
A new open-source library has been released by the Robotics and Perception Group of Davide Scaramuzza.
Technical details of the algorithm and information gain formulations can be found in the ICRA paper:
http://rpg.ifi.uzh.ch/docs/ICRA16_Isler.pdf
S. Isler, R. Sabzevari, J. Delmerico, D. Scaramuzza
An Information Gain Formulation for Active Volumetric 3D Reconstruction
IEEE International Conference on Robotics and Automation (ICRA), Stockholm, 2016.