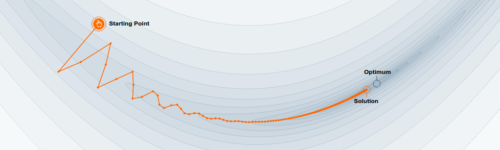
Machine LearningMathPosts Optimization – why momentum really works luigi 4 April 2017 0 Comments computer vision, machine-learning, math This post explains why momentum works in optimization. Nice interactive images are used to this aim. Here you can find another overview of gradient-descent based methods.