Third TRADR Joint Exercise in Prague and VREP Simulations
From July 4th to July 8th, I participated to the third TRADR Joint Exercise which took place in Prague (Czech Republic). The full system was evaluated by firemen end-users who performed a search and rescue mission by teleoperating two TRADR UGVs.
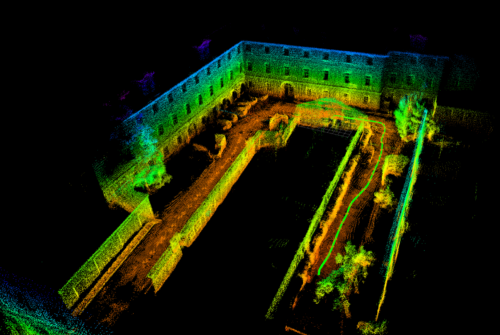
It was great to work side by side with all the TRADR team members. In particular, I had such a great time with Renaud, Abel and Cesar from ETHZ, working on mapping, localization and path-planning on multi-sortie missions. Above and below you can find some snapshots of what we obtained. Eventually, we got a paper about this work accepted at SSRR 2016.
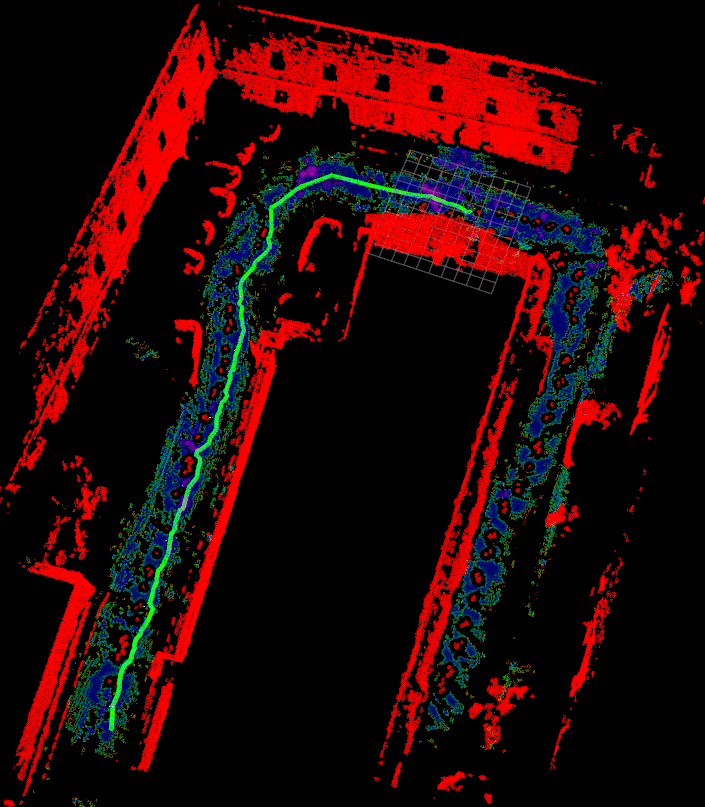
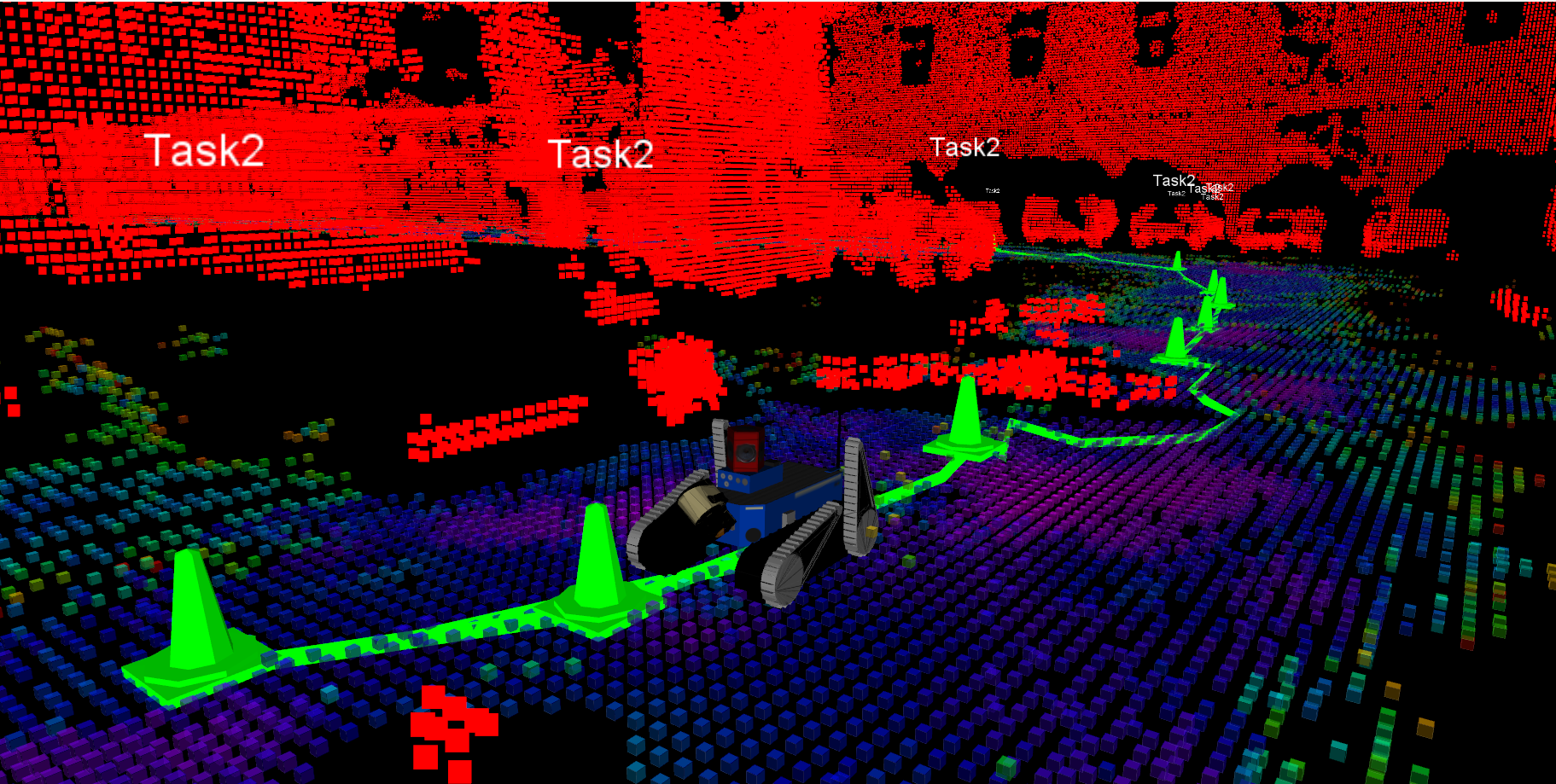
Left: Segmentation of the merged map into obstacles (red) and traversable regions (blue); a globally planned path (green line) is shown on the traversable region. Right: An example of planned path (green line) joining a set of waypoints (green traffic cones) selected by the end-user, directly on the traversability map.
In the meanwhile, from Rome, we also made some nice progresses with V-REP simulation. Now the simulated UGVs are equipped with “grousered” tracks and flippers and for the first time we obtained a very nice dynamic behavior when the robots climb stairs.