3D Semantic Parsing of Large-Scale Indoor Spaces
“3D sensing has experienced a major progress with the availability of mature technology for scanning large-scale spaces that can reliably form 3D point clouds of thousands of square meters. Existing approaches for understanding semantics are not suitable for such scale and type of data. This requires semantic parsing methods capable of coping with this scale, and ideally, exploiting the unique characteristics of such point clouds (e.g. complexity, richer geometric information, etc.).
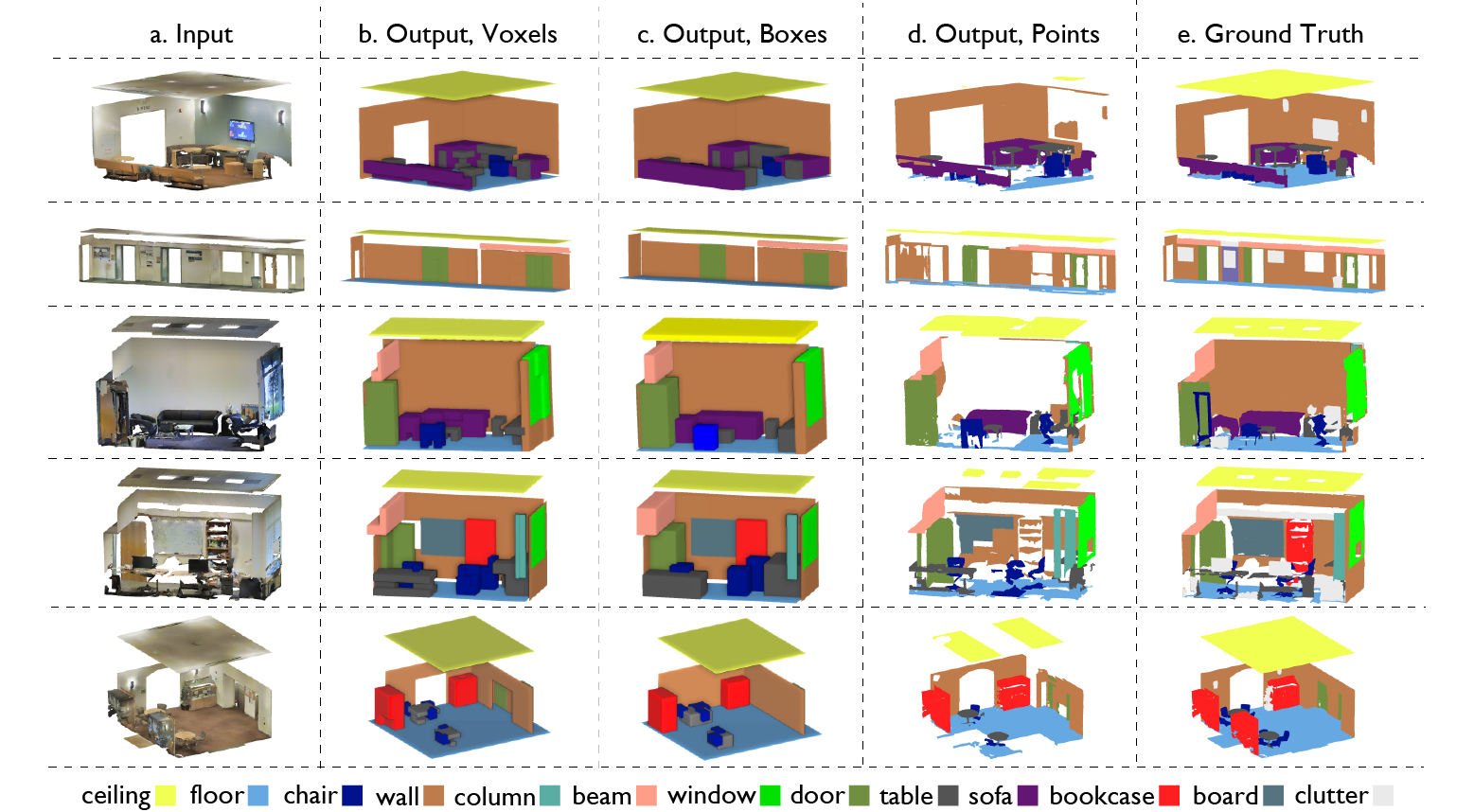
We propose a method for parsing the point cloud of an entire building using a hierarchical approach (see Fig 1): the first step parses the point cloud into semantically meaningful spaces (e.g., rooms, hallways, lobby) and aligns them in 3D. The second step parses each of these spaces into their structural and building elements (e.g., walls, columns, etc). Below is a short description of our method. For details check out our paper and supplementary material.”
See more on this page
http://buildingparser.stanford.edu/method.html