A Self-Driving Fleet Arrives in Pittsburgh This Month – Uber Steps on the Accelerator
Uber is definitely stepping on the accelerator… “Starting later this month, Uber will allow customers in downtown Pittsburgh to summon
Read MoreRobotics & Computer Vision Engineer, PhD

Uber is definitely stepping on the accelerator… “Starting later this month, Uber will allow customers in downtown Pittsburgh to summon
Read More
A new journal paper about ElasticFusion has come out from Davison’s group. New exciting results on 3D light source mapping are presented.
Read More
A new exciting work from the Computer Vision Group of TUM. “DSO is a novel direct and sparse formulation for
Read More
“3D sensing has experienced a major progress with the availability of mature technology for scanning large-scale spaces that can reliably
Read More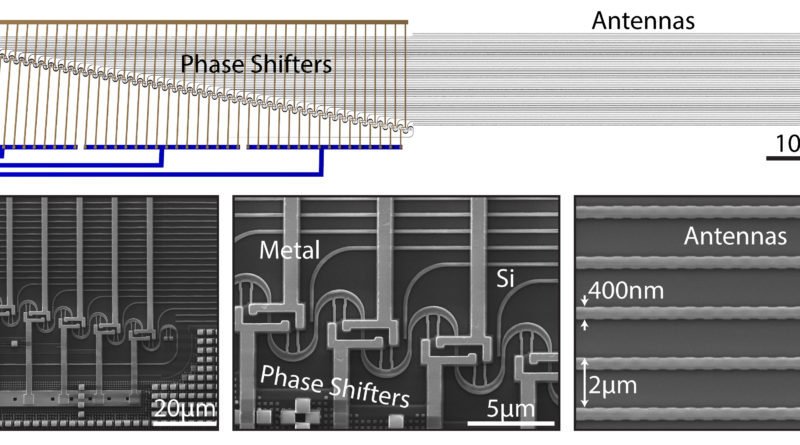
“At MIT’s Photonic Microsystems Group, the authors are developing a lidar-on-a-chip system that is smaller than a dime, has no
Read More
This is a very interesting workshop with very nice perspectives. Oliver Brock, TU Berlin „Geometry is dead” Hanif Kara said
Read More
The slamcore start-up is pioneering breaktrough new algorithms for accurate and robust real-time event camera motion tracking and scene reconstruction
Read More
Normal estimation in point clouds is a crucial first step for numerous algorithms, from surface reconstruction and scene understanding to
Read More
SpotMini is a new smaller version of the Spot robot. It can be equipped with an arm and is all-electric (no hydraulics).
Read More
In this work, Researchers of MIT present an high-performance and tunable stereo disparity estimation method. It succeeds to reach a
Read More
How about asking your robot to make a complete laundry cycle?…PR2 seems almost there. See more on this page.
Read More