Fourth TRADR Evaluation Exercise in Rotterdam with GB Firefighters
From November 6th to November 17th, I took part to the fourth TRADR Evaluation Exercise in Rotterdam. The full TRADR system was evaluated by the GB firefighters end-users
Read MoreRobotics & Computer Vision Engineer, PhD
From November 6th to November 17th, I took part to the fourth TRADR Evaluation Exercise in Rotterdam. The full TRADR system was evaluated by the GB firefighters end-users
Read More
On September 17 2017, I was with the Alcor and TRADR teams in Piombino, for the European Robotics League event. We gave
Read More
The TRADR EU project is on Euronews. The video report shows the simulated disaster scene we used in the last
Read More
In this page, the Authors K. Tateno, F. Tombari, I. Laina and N. Navab present the following paper in which CNNs are used
Read More
In this post, Torsten Sattler presents his upcoming CVPR 2017 paper “Comparative Evaluation of Hand-Crafted and Learned Local Features” You
Read More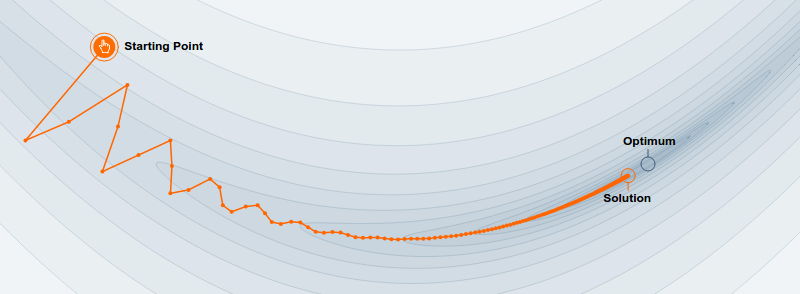
This post explains why momentum works in optimization. Nice interactive images are used to this aim. Here you can find another
Read More
Horus is an Italian project. It’s one of those projects that makes you think I would love to join the
Read More
Handle is definitely a big Wow. From the youtube video description: “Handle is a research robot that stands 6.5 ft
Read More
Micheal Milford explains how to make a driverless car see the road ahead. From his Google+ post: “We were asked to
Read More
In this post, Alejo Concha Belenguer presents his new work RGBDTAM. This is a direct SLAM pipeline that runs in real-time and
Read More
A nice meka with the option to engage AR battles
Read More
This post reports that a self-driving Uber car was involved in a high-speed crash in Tempe, Arizona. No one was
Read More
This year, the TRADR review took place at the Scuola Di Formazione Operativa of Vigili del Fuoco (Italian Firefighters) in
Read More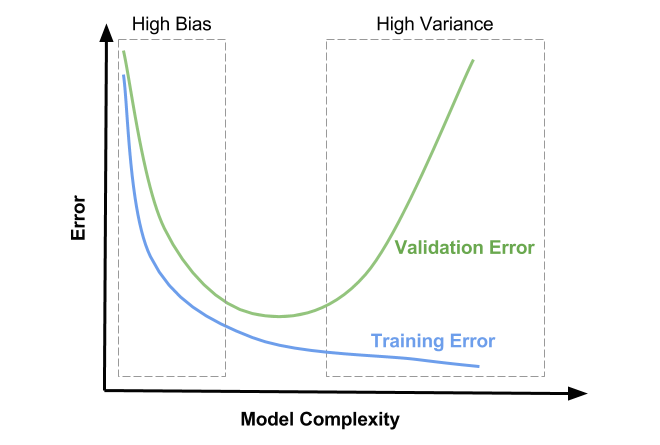
This very nice post clearly explains the bias and variance tradeoff http://www.learnopencv.com/bias-variance-tradeoff-in-machine-learning/ This tradeoff can be mathematically stated by the
Read More
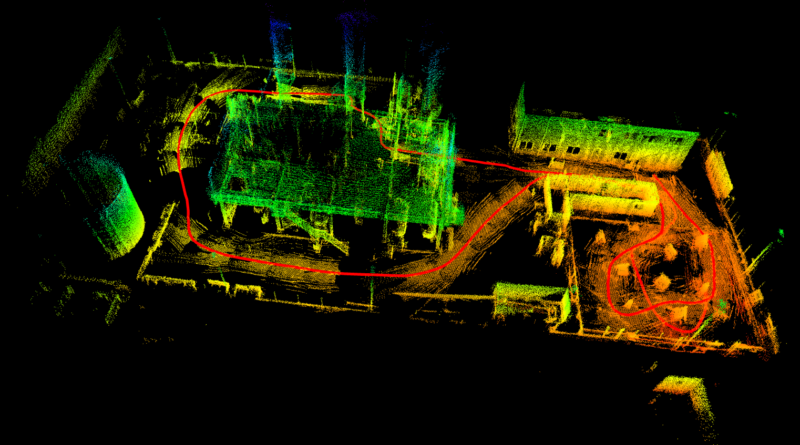
Our recent work with ETHZ was awarded Best Late Breaking Report at SSRR 2016 “3D Localization, Mapping and Path Planning for
Read More